
 Licence 2 – Semestre 4
Licence 2 – Semestre 4
Les 18 étudiants de l’option Introduction à la robotique mobile ont eu une vingtaine d’heures pour réaliser un projet avec un robot lego mindstorm programmé en python.
Un serpent faisant une course de slalom, un tracker déplaçant des plots ou un robot cartographiant une pièce : ils ont présenté leurs projets le 28 mai 2018 malgré les bugs matériels et logiciels !
 L’initiation à la robotique m’a permis d’entrevoir l’immensité du domaine. Grâce au constructeur Lego et à son bloc programmable (ssh) j’ai découvert une toute autre façon de coder. Très vite nous nous sommes confrontés aux défis de la robotique ; à savoir : se repérer dans l’espace, l’importance de la précision des calculs, etc.
L’initiation à la robotique m’a permis d’entrevoir l’immensité du domaine. Grâce au constructeur Lego et à son bloc programmable (ssh) j’ai découvert une toute autre façon de coder. Très vite nous nous sommes confrontés aux défis de la robotique ; à savoir : se repérer dans l’espace, l’importance de la précision des calculs, etc.
Alors, certes en 2ème année d’informatique, on a théorisé sur le papier mais il y a eu beaucoup de phases de tests et d’ajustement de nos calculs et la logique du programme.
Cette unité d’enseignement fût très instructive et je suis content qu’on nous ait mis à disposition des petits jouets ; qui-plus est, c’était amusant !
Pierre
 Lors de la présentation des options que je pouvais choisir au début du semestre 4 en 2ème année de Licence Informatique, l’option d’initiation à la robotique m’a tout de suite conquis car cela allait me permettre de voir une approche différente de la programmation.
Lors de la présentation des options que je pouvais choisir au début du semestre 4 en 2ème année de Licence Informatique, l’option d’initiation à la robotique m’a tout de suite conquis car cela allait me permettre de voir une approche différente de la programmation.
En effet, durant le projet de groupe, il ne fallait plus seulement s’occuper de l’aspect programmation mais aussi des défauts que peuvent avoir les capteurs, prendre en compte le temps de lancement des moteurs, les imperfections du monde qui entourent le robot, etc.
Ce sont tous ces petits détails auxquels on ne pense pas lorsqu’on est devant notre écran qui nous ont poussé à constamment nous améliorer et c’est cela qui m’a plu dans cette option
Émilien
Robot tracker
Le robot tracker doit parcourir la pièce, repérer un objet en le différenciant d’un mur, l’attraper et le rapporter à son point de départ. Il peut récupérer jusqu’à 3 objets (les-dit objets ont été fait par les étudiants eux-mêmes).
La difficulté a été de gérer la panne du gyroscope : le trajet de l’aller est stocké dans un fichier et exploité pour faire le trajet retour. Ceci marche plutôt bien malgré les approximations des mesures.
Voiture autonome
Un prototype de voiture autonome… ou au moins les esquisses des prémisses. Le robot suit la brique de lait, qu’elle avance, recule ou tourne (à une vitesse raisonnable). À la fin, le robot s’est garé en effectuant un créneau.
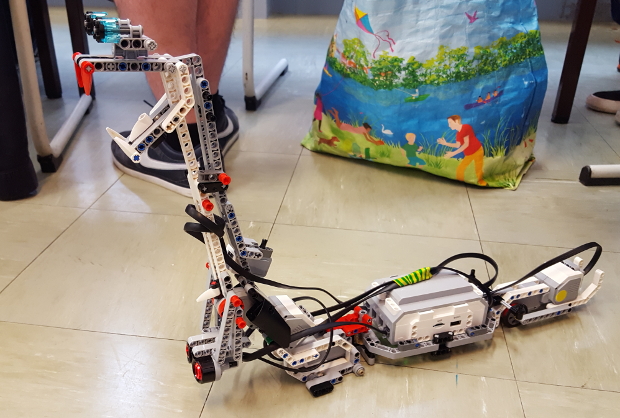
Robot serpent
Le serpent devrait réaliser une course de slalom… mais il a préféré aller manger la main d’un étudiant au bout de deux poteaux… Il a néanmoins été plus rapide que son adversaire.. malheureusement non filmé.
La difficulté ? Maîtriser le serpent capricieux ! Le robot a un problème de conception et ses roues ont une mauvaise adhérence sur certains types de sols. Ce qui marchait un jour ne marchait plus le lendemain…
Robot danseur
Le robot Giro devait écouter une musique puis danser dessus en réagissant aux nombres de bits par seconde. Un vrai Fred Astaire ! Malheureusement il s’est révélé sourd…
Robot cartographe
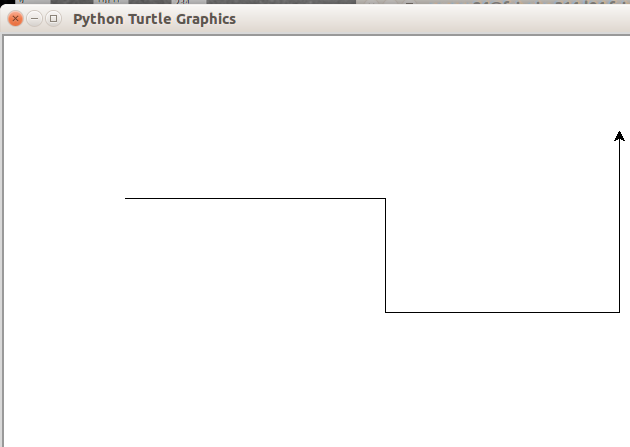
Résultat de la cartographie du coin de la pièce.
Le robot cartographe parcourt les murs d’une pièce puis trace un plan à l’échelle. Il ne fonctionne que dans les pièces aux murs droits et aux angles droits.
La difficulté a été d’enregistrer les mouvements pour pouvoir tracer une carte. Le robot fait beaucoup de petits mouvements saccadés qu’il faut ensuite lisser pour produire une carte réaliste.
Stand de réparation
